The agent model main class. More...
#include <AgentModel.h>
Public Member Functions | |
| AgentModel ()=default | |
| ~AgentModel () override=default | |
| void | init () |
| void | step (double simulationTime) |
 Public Member Functions inherited from agent_model::Interface Public Member Functions inherited from agent_model::Interface | |
| Interface ()=default | |
| virtual | ~Interface ()=default |
| Input * | getInput () |
| const Input * | getInput () const |
| State * | getState () |
| const State * | getState () const |
| Memory * | getMemory () |
| const Memory * | getMemory () const |
| Parameters * | getParameters () |
| const Parameters * | getParameters () const |
Protected Member Functions | |
| void | decisionProcessStop () |
| void | decisionLaneChange () |
| void | decisionLateralOffset () |
| void | consciousVelocity () |
| void | consciousStop () |
| void | consciousFollow () |
| void | consciousLaneChange () |
| void | consciousLateralOffset () |
| void | consciousReferencePoints () |
| double | subconsciousLateralControl () |
| double | subconsciousFollow () |
| double | subconsciousStop () |
| double | subconsciousSpeed () |
| double | subconsciousStartStop () |
Protected Attributes | |
| agent_model::StopHorizon | _stop_horizon {} |
| attribute to store the stop points | |
| agent_model::VelocityHorizon | _vel_horizon {} |
| attribute to store the stop points | |
| agent_model::Filter | _filter {} |
| attribute to store the speed reaction filter | |
| agent_model::DistanceTimeInterval | _lateral_offset_interval |
| attribute to store the lateral offset interval | |
| agent_model::DistanceTimeInterval | _lane_change_process_interval |
| attribute to store the lane change interval | |
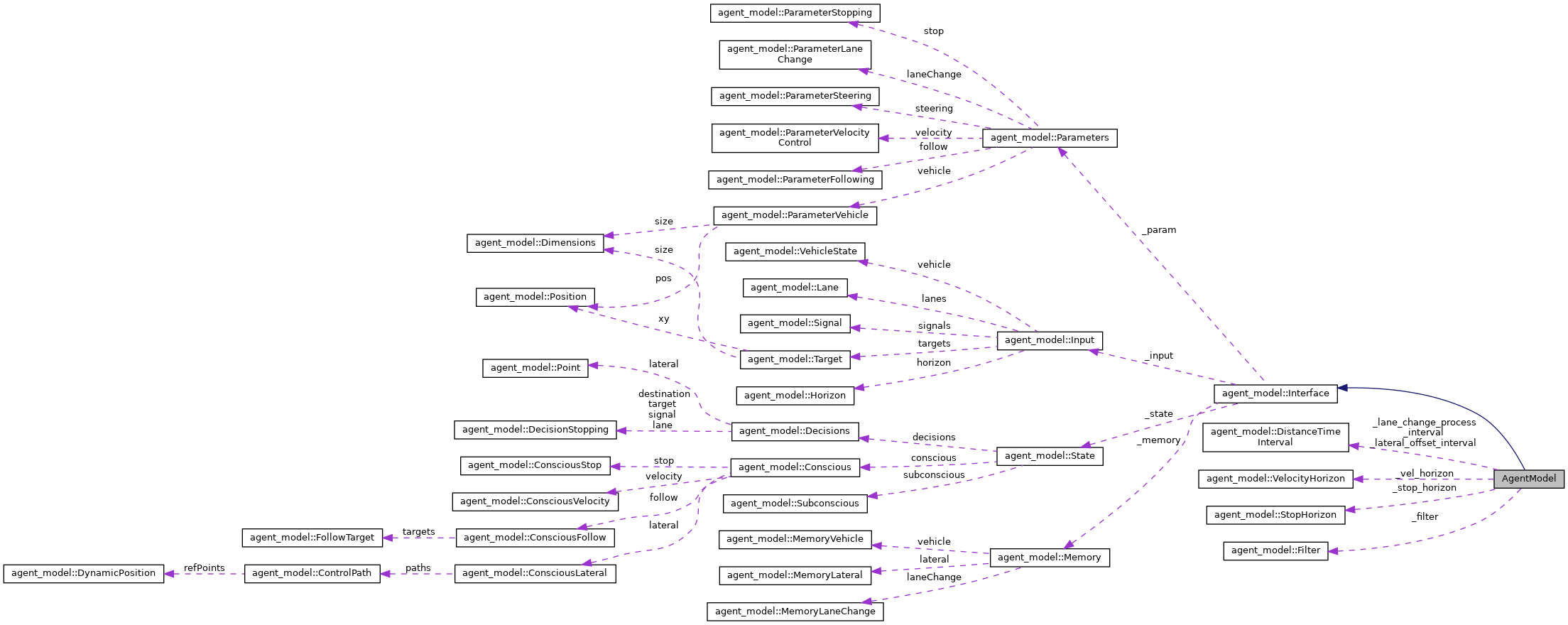
| Protected Attributes inherited from agent_model::Interface | |
| Input | _input {} |
| The input of the agent model. | |
| State | _state {} |
| The state of the agent model. | |
| Memory | _memory {} |
| The memory of the agent model. | |
| Parameters | _param {} |
| The parameters of the agent model. | |
Additional Inherited Members | |
| Public Types inherited from agent_model::Interface | |
| typedef agent_model::Input | Input |
| typedef agent_model::State | State |
| typedef agent_model::Memory | Memory |
| typedef agent_model::Parameters | Parameters |
Detailed Description
The agent model main class.
Constructor & Destructor Documentation
◆ AgentModel()
|
default |
Default constructor
◆ ~AgentModel()
|
overridedefault |
Default destructor
Member Function Documentation
◆ consciousFollow()
|
protected |
Calculates the net distance to the relevant following traffic participants
◆ consciousLaneChange()
|
protected |
Calculates the lane change process
◆ consciousLateralOffset()
|
protected |
Calculates the offset to be added to the reference points
◆ consciousReferencePoints()
|
protected |
Calculates the reference points for the lateral motion control
◆ consciousStop()
|
protected |
Calculate the process of the stop maneuver
◆ consciousVelocity()
|
protected |
Calculates the target speed based on rules, the curvature of the track
◆ decisionLaneChange()
|
protected |
Calculates the decision to perform a lane change
◆ decisionLateralOffset()
|
protected |
Calculates the decision to perform a lateral offset
◆ decisionProcessStop()
|
protected |
Calculates process of stopping and starting
◆ init()
| void AgentModel::init | ( | ) |
Initializes the driver model. Shall be ran before the the first step is executed.
◆ step()
| void AgentModel::step | ( | double | simulationTime | ) |
Performs a driver model step. The driver model must be initializes (
- See also
- init()).
- Parameters
-
simulationTime The current simulation time
◆ subconsciousFollow()
|
protected |
Calculates the reaction to follow other traffic participants
- Returns
- The reaction value to follow
◆ subconsciousLateralControl()
|
protected |
Calculates the reaction for the lateral motion control based on the reference points
- Returns
- The reaction value for lateral motion control
◆ subconsciousSpeed()
|
protected |
Calculates the reaction to reach the desired speed, including predictive control
- Returns
- The reaction value to control speed
◆ subconsciousStartStop()
|
protected |
Calculates the pedal behavior when starting or stopping for sub-microscopic simulations
- Returns
- The pedal value
◆ subconsciousStop()
|
protected |
Calculates the reaction to stop the vehicle at the desired point
- Returns
- The reaction value to stop
The documentation for this class was generated from the following files:
- src/AgentModel.h
- src/AgentModel.cpp
